Dans la guerre qui oppose oz aux herbes concurrentes, il faut prendre des décisions, élaborer des stratégies, tout en suivant un code de l’honneur, l’ennemi est respectable, notre guerre est propre.
L’une des problématiques, est la phase du demi-tour, et c’est le sujet du jour.
Pour effectuer un demi tour dans de bonnes conditions, il faut tourner, mais pas trop vite, avancer mais pas trop peu, reculer mais pas trop longtemps !
Un casse-tête, selon le type du sol, gras, sec, sableux, boue en sortie de rangée, il faut trouver le bon compromis.
Un autre problème, l’odométrie, la distance parcourue par les roues, est sujette à des variations selon le patinage, en terrain sableux ou humide par exemple.
Le meilleur rendement pour les mesures odométriques actuellement pour Oz, se situent sur les roues arrières, en effet le poids de l’outil fait qu’elle suivent bien le sol sans trop patiner, ni trop se faire tracter, mais uniquement à une vitesse qui ne descend pas en dessous d’un certain seuil.
Alors faisons le demi-tour le plus serré possible :

Mais un autre problème est la quasi impossibilité de faire un demi tour sur place, les 4 roues motrices soulèveraient trop de terre, et la base du châssis pourrait se trouver soulevée et les roues pourraient perdre le contact avec le sol.
De plus les virages trop serrés abîment le sol, est c’est exactement ce que l’on cherche à éviter avec un binage en douceur, on respecte les accords de Genève.
Alors faisons un demi-tour un peu moins serré :

Toujours, pas, trop de contraintes sur les virages, il faut tourner moins fort !
Résumons ! Il faut donc, tourner, en douceur, pas trop vite, et pas trop doucement pour ne pas se perdre une fois le dos à la rangée !
Alors faisons un demi-tour souple :

La aussi, une nouvelle contrainte, ce demi-tour prends beaucoup trop de place, il faut penser que le maraîcher veut une exploitation maximale de sa superficie cultivable !
Il faut donc réfléchir à une stratégie de demi-tour et être capable de changer de tactique si cela ne réponds pas aux attentes, nos frappes doivent rester chirurgicales.
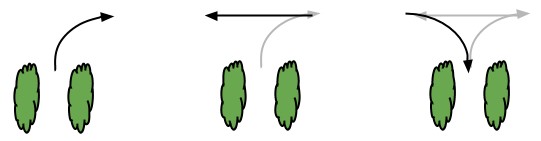
Dans les cas précédents, nous n’avons pas exploiter la marche arrière pour tasser le haut de la courbe du demi-tour vers la sortie de la rangée, c’est la solution, décomposons la en 3 étapes.
Voila ce que ça donne avec la version virage en 3 phases, en ré-entrée dans la rangée :
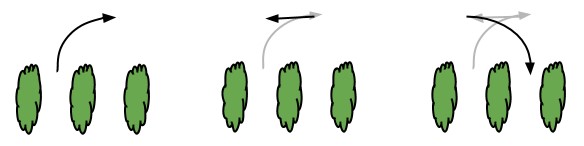
En changement de rangée :
C’est fonctionnel, cela répond aux attentes, mais on voit que la phase de recul, est assez importante, et que les quarts de cercles sont assez longs en distance, au final le risque d’erreurs croit avec la distance parcourue.
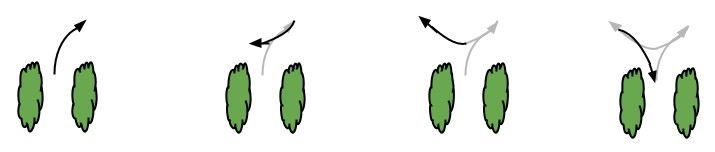
Que pourrions nous améliorer, au final, un demi tour c’est un 180°, nous pourrions décomposer avec des manœuvres de 60°, pointer sur + 60°, faire une marche arrière sur +120° et avancer sur +180°.
Nous pourrions tenter des paliers de 30°, mais le robot risquerait de s’embourber ou de ne pas prendre assez de vitesse.
Regardons la version 5 phases en action :
En ré-entrée dans la rangée :
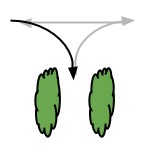
En changement de rangée :

On constate que les distances parcourues autour de la sorties sont plus réduites, on limite donc le risque de dérive, suite à une nature différente de sol par exemple, et on gagne un peu de temps sur le demi-tour.

Les deux tactiques cohabitent dans les robots, les retours terrains vont permettre aux généraux de choisir laquelle sera la plus efficace et sur quel terrain !
Repos !
A vos robots !
Joan





