
Comme vous pouvez le voir, Guitou est un jeune qui en veut et qui croque la vie à pleines dents. Mais notre Guitou à nous, il n’est pas que jeune, c’est aussi un futur ingénieur agricole alors nous l’avons embauché pour 6 mois afin de peaufiner sa formation d’agronome.
Un futur ingénieur agricole dans une start-up qui fait des robots cela paraît totalement aberrant, on vous l’accorde… Mais comme nos robots travaillent dans les champs, on s’est dit que cela aurait du sens d’engager un stagiaire afin qu’il prenne autant l’air que notre cher Oz des champs.
Notre Guitou afin d’étudier Oz, a choisi la méthode suivante :
« Je vais chez plusieurs agriculteurs et on se partage une parcelle, l’agriculteur gère sa parcelle comme il ferait habituellement et je gère l’autre moitié avec le robot Oz. »
Guitou a ainsi construit 5 couples de parcelles chez des producteurs locaux motivés.
Et le but ultime est de faire évoluer et améliorer les fonctionnalités du robot !Son but est de tester, dans un même contexte pédoclimatique et sur chaque couple de parcelles, deux itinéraires techniques : un itinéraire avec le robot Oz et un itinéraire pratiqué habituellement par l’agriculteur.
Première question : que teste-t-on ?
Et bien 2 modalités, réparties ainsi :
– Une modalité désherbage Oz menée par notre Guitou international
– Une modalité désherbage avec les méthodes et outils utilisés par l’exploitant
Deuxième question : que mesure-t-on ?
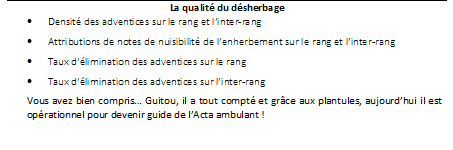
Guitou est un ingénieur en devenir, il se doit d’être rigoureux ! Voici donc les paramètres qu’il a suivit :
Attention : cet article est basé sur les premiers résultats obtenus par Guitou, sur un nombre très faible de répétitions pour une étude scientifique plus complète il faudra se référer à son mémoire complet.Histoire d’occuper notre super stagiaire, nous lui avons aussi demandé de travailler sur l’impact d’Oz sur la structure du sol et l’activité biologique, ainsi que de réaliser une étude économique complète des différents types de conduite. Mais comme à chaque jour suffit sa peine, concentrons-nous aujourd’hui sur les aspects techniques du désherbage. Nous détaillerons ses futurs résultats quand il nous aura rendu son rapport de stage définitif !
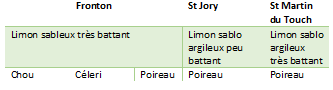
Des situations très différentes d’une parcelle à l’autre. Sur ce panel de situations diverses, Guitou et l’exploitant ont des fois été confrontés à des enherbements critiques (culture à la suite d’une friche par exemple). Une parcelle de chou a été abandonnée par manque d’eau à la plantation (à la fois par Guitou et l’exploitant) tandis que sur celle de céleris Oz et Guitou ont pu maintenir la parcelle en état productif là où l’exploitant a malheureusement dû abandonner la sienne.
| « Nous avons travaillé sur des parcelles en production, chez de vrais agriculteurs, envers lesquels nous nous sommes engagés. Il était donc impossible de tester des choses potentiellement dommageables pour la culture ou inefficaces, ce qui aurait pourtant pu être intéressant »
Guitou, le 24 novembre 2015 à 8h30 AM |
 |
Alors Oz, comment te débrouilles-tu en désherbage?
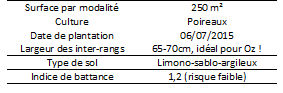
Pour vous présenter un exemple du travail réalisé, voici un extrait des résultats obtenus par Sir Guitou sur l’exploitation à Saint-Jory, au nord de Toulouse.
Les essais ont commencé 9 jours après la plantation, sur un sol léger.
Le maraîcher quant à lui, est passé 5 fois avec la motobineuse électrique, 1 fois à la houe maraîchère, 1 fois avec un râteau à gazon, 1 fois avec un désherbeur thermique et 1 rattrapage manuel.Le robot a travaillé 7 fois en 2 mois. Pour des raisons climatiques et pour rattrapage, nous sommes intervenus 3 fois en manuel.
Lors de chaque passage, Guitou a attribué une note de nuisibilité à l’enherbement. Cette note tient compte de la densité, du stade, et de la nuisibilité potentielle des adventices présentes.
Plus la note baisse, plus la situation se dégrade.
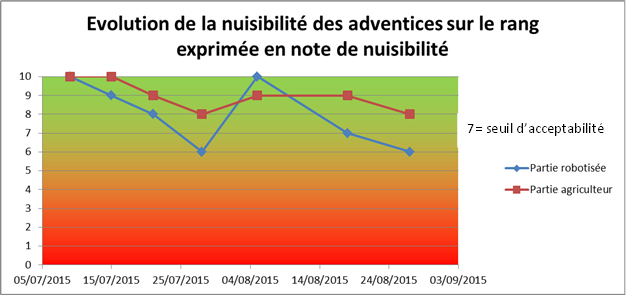
Sur le rang, on peut voir que le robot a été un peu moins efficace que l’itinéraire technique habituel du maraîcher.
Cette différence d’efficacité a 3 sources principales :
- Un manque d’efficacité lors du buttage effectué fin Juillet
- Plus d’irrigation sur la partie robotisée
- Un passage empêché par la météo au début du mois d’août qui fut difficile à rattraper
Sur l’inter-rang, la nuisibilité des adventices est restée identique et faible sur les deux modalités de travail du sol.
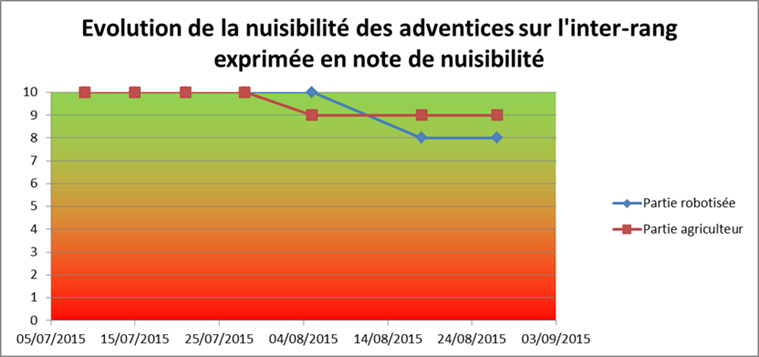
L’efficacité moyenne des socs du robot sur l’inter-rang est de 95,25 % !
Quels outils pour quelle culture ?
Maintenant regardons dans les 5 parcelles et selon les cultures, l’efficacité de nos outils sur le rang :
Sur Céleri :
Les herses étrilles ont été jugées trop agressives (oui notre ami Guitou aime beaucoup le céleri, et ne supporte pas de devoir lui faire du mal). Les brosses ont donc été utilisées pour désherber sur le rang par micro-buttage (en 7 passages).
Sur les 3 parcelles en Poireaux:
Plusieurs outils furent testés par Guitou, les herses étrilles sur le rang, lors des premiers passages (2 premiers passages), puis essentiellement les brosses pour réaliser un micro-buttage des poireaux (entre 2 et 4 passages de brosses) pour les sites de Saint-Martin et Saint-Jory. Le buttage régulier réalisé par les brosses est très efficace. A Fronton du fait de la battance, l’on est passé directement avec des brosses sans utiliser les herses étrilles (9 passages).
Voici une synthèse des résultats sur les poireaux de l’exploitant de St Jory :

On remarque que les outils de travail sur le rang, herses et brosses sont efficaces ! Les socs ont une efficacité moindre, car majoritairement utilisés dans l’inter-rang.
Quelques réflexions intéressantes de notre ami Guitou sur les outils qu’utilise Oz :
– L’efficacité des brosses sur le rang décroit avec les passages : il n’y a plus assez de terre fine disponible pour venir correctement recouvrir la butte. Sur les céleris, un débuttage a été fait pour relancer l’efficacité des brosses. Cela nous donne une piste de développement intéressante pour Oz : créé un outil adapté pour le débuttage, afin de pouvoir travailler sur des cycles complets de buttage / débuttage.
– La herse étrille est en effet dépendante d’un stade précis de la culture / des adventices, et sensible à l’humidité du sol. Ces essais ont également montré que son efficacité est plus faible si beaucoup de résidus présents en surface. Les brosses restent l’outil le plus polyvalent pour le désherbage sur le rang, mais les herses étrilles peuvent réaliser de l’excellent travail lorsque les conditions sont adaptées.

Qualité du désherbage : tu fais l’essai t’es transformé
- Bonne (supérieure à 95 %)
- Des progrès à faire pour le travail sur le rang côté robot, en améliorant les outils.
- Près de 70 % de plantules détruites sur le rang quelque soit l’outil
- Tests de nouveaux outils : doigts Kress/socs buttoir qui seront prolongés en 2016
Voici un petit d’aperçu de l’étude de Guitou, où il fit preuve d’une grande capacité de travail et de rigueur, notamment lors des premiers désherbages alors qu’il devait maîtriser le robot et son comportement. Guitou et les agriculteurs qui ont accepté cette expérimentation ont vraiment eu un impact sur la fiabilisation d’Oz et ont permis la mise en place de premières références concrètes. Nous savons ainsi qu’Oz sera encore plus fort l’année prochaine !
Ces références, issues du terrain, seront reprises et améliorées, nous en sommes certains chez Naïo Technologies, par des organismes de conseils et instituts techniques du monde agricole.
La finalité est de créer ensemble des références pour aider les agriculteurs à valider leurs choix d’investissements et aussi faire évoluer les outils technologiques permettant de diminuer l’usage de produits phytosanitaires et réduire les contraintes physiques de ces tâches pénibles.
Enfin, on espère que Guitou aura une bonne note à son mémoire de fin d’étude, le premier au monde sur un robot de désherbage autonome !
L’année prochaine on tente la même chose dans les champs d’ananas à Caracas.





